PRA 是一個以 PyTorch 實作的影像生成研究項目,屬於 class-conditional pixel-space autoregressive image generation 模型與訓練框架。它要解決的問題,是直接在像素空間逐步生成圖片時,單步誤差大、而且 teacher-forced training 與推理流程不一致,令誤差一路累積。
現有 pixel-space continuous-token autoregressive 做法,多數直接預測高維像素 patch,或用 x-prediction、input noise injection 減輕誤差,但改善有限;exact rollout training 雖然更貼近推理,代價又太高。PRA 的取向是加入 Parallel Rollout Approximation (PRA):先生成低維 intermediate states,再經 pixel decoder 映射回 pixel-space tokens,同時用近似推理時的 pixel-feedback 方式保留平行訓練效率。
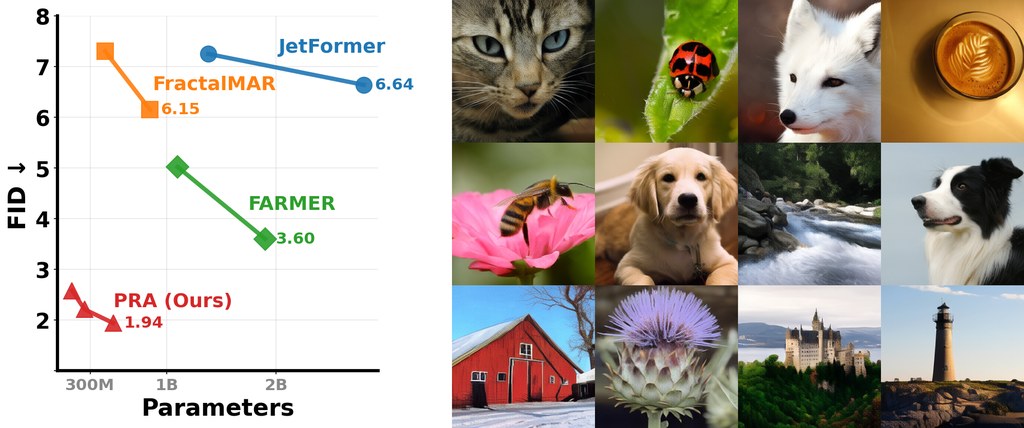
這個設計的重點,不是單純追求更大模型,而是重新處理「訓練見到的輸入」與「生成時真正收到的回饋」之間的落差。論文資料顯示,它在 ImageNet-1K 256×256 的 class-conditional 生成上,PRA-S 135M 參數已做到 FID 2.58,優於先前 billion-scale pixel-space AR 的 3.60;PRA-L 511M 進一步到 1.94,定位很清楚,就是衝着 pixel-space AR 的 SOTA 而來。
部署理解上,儲存庫已提供 environment.yml、requirements.txt、預訓練權重與 sample_ddp.py,代表作者預設你會用多卡分散式抽樣與評測。評估指標包括 FID、Inception Score、precision、recall,另有 ImageNet classification probing accuracy 作為生成以外的補充觀察,表示作者也在測試表徵能力,而不只看出圖漂亮與否。
- 項目類型:研究原型兼模型實作,集中展示 PRA 訓練與取樣流程
- 相關模型:PRA-S、PRA-B、PRA-L,參數量約 135M、250M、511M
- 主要差異:不用離散 tokenizer,維持 pixel-in、pixel-out AR 介面
- 較適合情境:研究 pixel-space AR、比較生成指標、重現 ImageNet 類條件生圖結果
- 需要留意:目前公開內容偏向研究重現,不是即裝即用的終端應用工具
受益最大的,會是做影像生成研究的團隊、想比較 autoregressive 與 diffusion 路線的人,以及要研究像素空間建模取捨的學術項目。對一般開發者來說,這個項目較像高水準實驗平台;有現成 checkpoint 和評測流程是優點,但 CUDA、PyTorch 與 FlashAttention 相容性仍需自行處理。