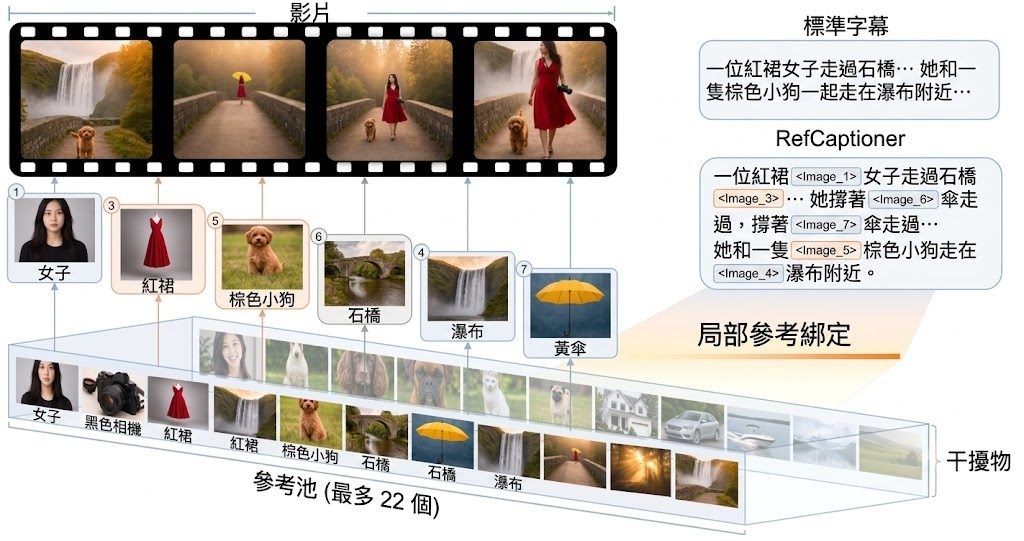
做影片描述時,最易出錯唔係句子寫得唔夠長,而係講到某個人、物件或角度時,無法交代文字究竟對應邊張參考圖。RefCaptioner屬於影片字幕生成模型項目,集中處理 multi-reference image-grounded video captioning:一邊保留細節與事實準確度,一邊將局部描述同候選參考圖明確綁定。
RefCaptioner 不只是把所有參考圖塞入輸出,而係會挑選真正有用的圖,將對應片語加上 <Image_N> 標籤,遇到同一主體的不同視角又會做分組,影片根本無出現的內容就直接略過。呢種設計減少錯配同誤導,比起只追求流暢字幕,更著重可核對性。
技術上,RefCaptioner用兩段式 post-training。先以 capability-preserving SFT 學會 grounded caption 格式,同時盡量保留一般 captioning 能力;之後再用 Hierarchical Coverage-Discounted GRPO(HCD-GRPO)同時優化 factual-caption 分支與 multi-reference grounding 分支,並加入 deterministic guards,避免產生格式錯誤或指向不存在圖片的標籤。
- 提供官方 inference pipeline、SFT 資料準備、HCD-GRPO 訓練同 MRVBench evaluation pipeline
- 已公開論文與模型權重,亦有 Data Format、Training、Evaluation 文件可跟進
- 環境分成主環境與 GRPO 專用 veRL/vLLM 環境,代表訓練流程較完整但配置亦較講究
- 適合做影片理解、資料標註、多鏡頭人物敘述同需要檢查圖文對應的研究團隊
部署與測試:推理、SFT、評估共用主環境,GRPO 另設一套環境,並且要對指定 veRL 版本套用 patch,反映佢較偏研究型工作流,而唔係下載即用的小工具。效能數字在提供的內容未見完整展開,但既然已附 MRVBench evaluation pipeline,至少表示作者有把「字幕寫得對」同「圖文對得準」分開檢驗,較適合重視可解釋輸出的團隊採用。