由 NVIDIA 團隊主導,Weili Nie、Julius Berner、Chao Liu 與 Arash Vahdat 是署名作者,核心貢獻者亦包括 Weili Nie、Julius Berner、Chao Liu。這個項目放在 NVlabs 名下,定位很明確:它不是單一生成模型,而是用 PyTorch 建成的訓練框架,集中處理 diffusion models 的加速與蒸餾,讓影像與影片生成可以用較少步數完成推理,同時保留大規模訓練能力。
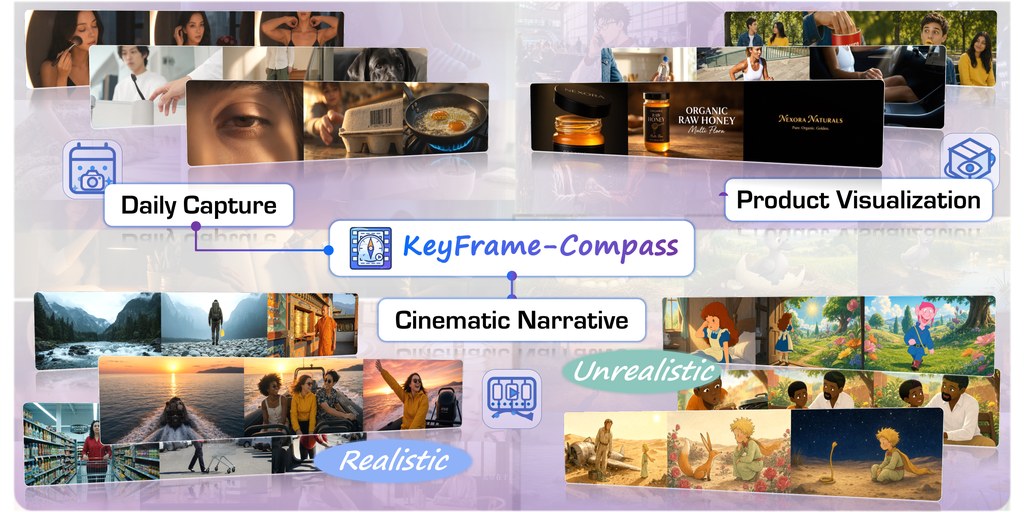
與一般只提供某一種加速技巧的研究代碼不同,FastGen 把 consistency models、distribution matching distillation、self-forcing、KD 等方法放進同一套結構,並且覆蓋 T2I、I2V、V2V 多種任務。這種設計的價值,在於研究團隊可以在相近配置與資料流程下比較不同蒸餾路線,而不是每試一種方法就重砌整套訓練管線。
基本理解方式:代碼庫包含 datasets、methods、networks、trainer 與 scripts,顯然以訓練、推理、評測三部分分開整理;環境方面建議用 Docker,也保留 conda 安裝路線,並支援 W&B 記錄。不過公開資訊未有列出完整 quick start 細節、現成模型清單或基準成績,現階段較像面向研究與工程團隊的基礎框架,而不是開箱即用的消費級生成工具。
Prompt:
4 NFE PDD on Wan2.1 14B: A joyful child,
with a big smile and arms spread wide,
swings energetically on a rusty old swing set in a sunlit backyard. The swing set, with peeling paint and creaking chains,
contrasts against the vibrant green grass and blooming flowers surrounding it.
The child's laughter echoes as they swing higher and higher,
their feet barely touching the ground at the bottom of each arc.
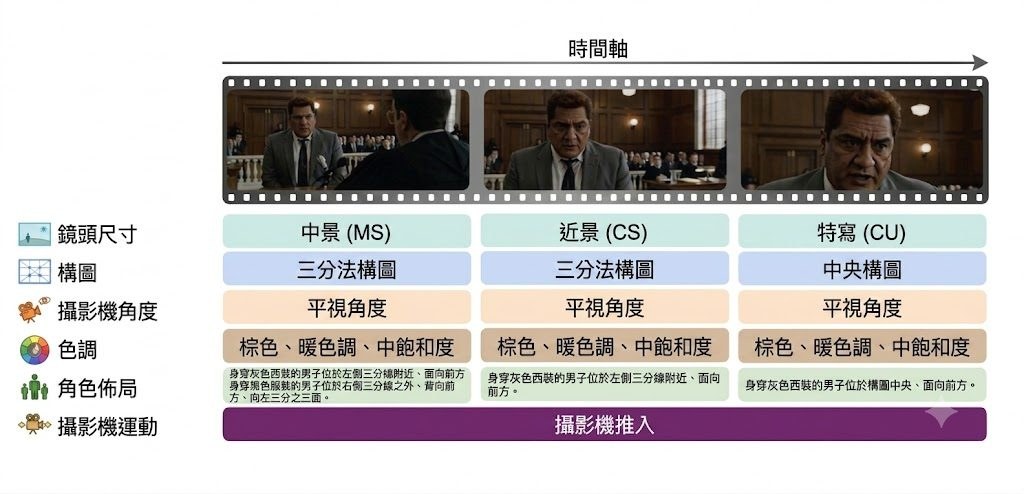
The scene is captured from a low angle,
emphasizing the height of the swings,
with the sun casting a warm glow over everything.
Medium shot focusing on the child and the swing set.- 屬於框架型項目,處理的是 diffusion models 如何更快生成,而不只是再訓練一個新模型
- 支援 ≥10B 參數的大規模訓練,較適合有多卡資源的團隊
- 任務涵蓋 T2I、I2V、V2V,對跨模態生成研究較有吸引力
- 方法層同時納入 consistency models、distribution matching distillation、self-forcing 等路線,方便做橫向比較
配合 NVIDIA 研究頁面的 FastGen-PDD 脈絡來看,這個項目也像是承載後續加速生成方法的底座,尤其面向 image 和 video generation 的 parallel decoding distillation。對想建立自家快速生成訓練流程、測試不同蒸餾策略,或者需要把大型 diffusion 項目整理成可維護代碼庫的團隊,FastGen 的參考價值高;但想直接下載即用、立刻看到完整評測結論的人,現有公開資料仍然偏少。