Universal Manipulation Exoskeleton(UME)是一個上肢外骨骼遙操作項目,重點不只是在遠端控制機械人,更是在操作期間即時提供 haptic torque feedback,並同步記錄整條手臂姿態與關節 torque 訊號。頁面指出,它想解決的核心問題是:很多機械人示範數據流程只記到動作,卻記不到接觸時的力與扭力,令模型較難學會順應環境的 compliant 行為。
與常見只靠視覺或位置控制的做法相比,UME 把「人手感受到的阻力」直接帶回操作者身上。這種透明 torque feedback 令操作者即使蒙眼,也能完成例如抽出受運動限制物件這類任務;對需要接觸、擠壓、推動或在狹窄空間內調整角度的工作,差異尤其明顯。
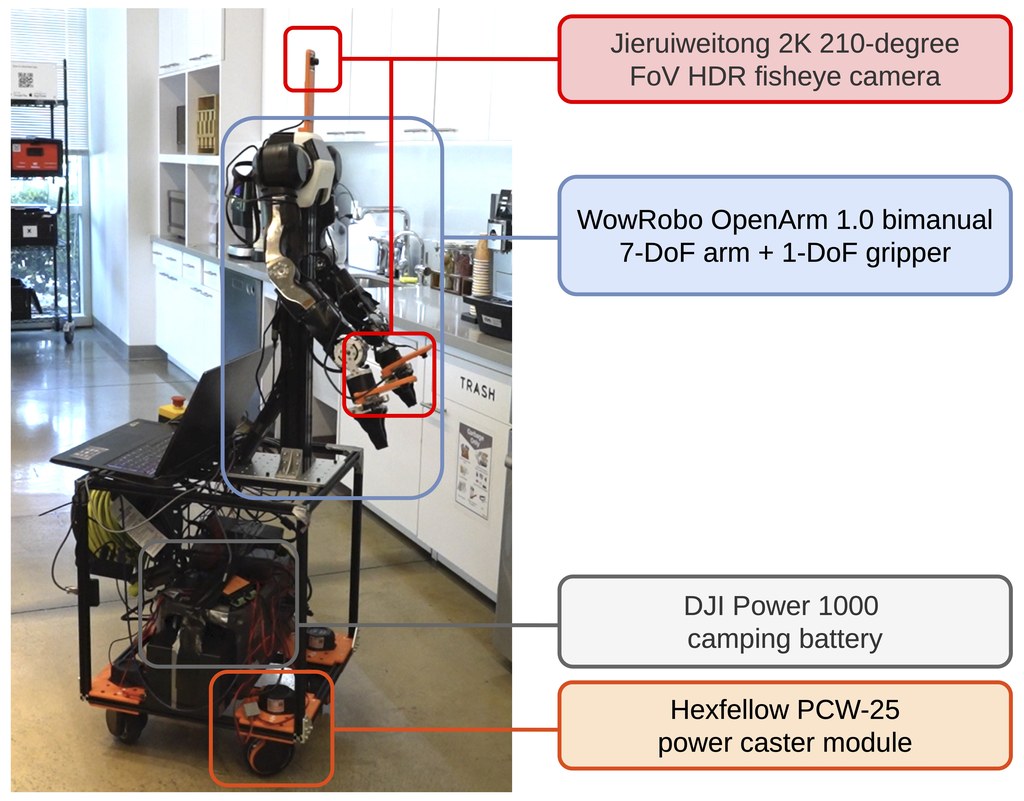
UME 配備 embedded IMU,可支援 mobile manipulation,並配合 universal retargeting algorithm,把同一套操作映射到不同機械臂,包括 7DoF OpenArm、7DoF Franka 與 6DoF X-ARM。整套 UME system 成本為 1900 美元,詳細成本拆解可在論文中找到,這對研究團隊或自建實驗平台的人來說,是很實際的參考點。
- 可記錄 whole-arm configurations 與 joint torque signals,用於訓練 active compliant policies
- 支援 bimanual、whole-body 及 long-horizon mobile manipulation 任務
- 已展示雪櫃取飲品、箱子翻轉、遮擋下推箱、狹窄桌面操作等情境
- 頁面提供 Paper、Video,Code 標示為 coming soon,現階段較適合先理解方法與看示範
最受用的會是做 Robotic、teleoperation、模仿學習與機械人數據收集的人。性能方面,頁面以多個 autonomous policy 示範強調高成功率與抗干擾能力,亦有與 UMI、No-torque 設定的比較,但若要判斷完整指標、成本細節與評測方式,仍需回到論文原文核實。