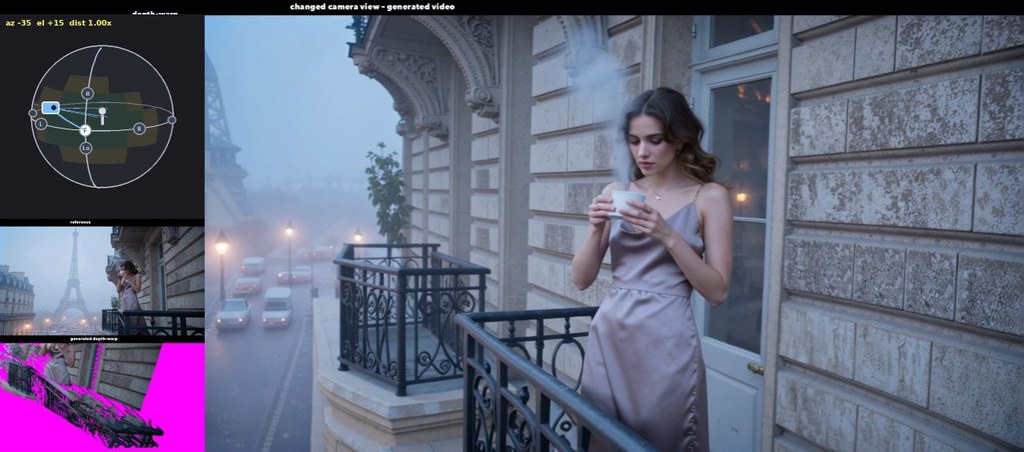
拍到過暗片段時,最直接嘅痛點係一加光就爆雜訊、細節仍然唔見。LTX-2.3-Black-Magic-LoRA 明確建基於 Lightricks/LTX-2.3,以 adapter 形式提供 IC-LoRA,定位唔係忠實還原訊號,而係替黑位內容做具時間連貫性嘅生成式重建,所以更接近 video-to-video 視覺特效模型,而唔係傳統 low-light enhancement。
取捨亦講得好清楚:當原始畫面資訊太少,模型會「推斷」暗處可能有咩,而唔係保證還原真實場景。呢種做法對氣氛鏡頭、夜景、舞台火光、森林或室內昏暗片段有吸引力,因為畫面觀感會比單純提亮更自然;但用喺證據保存、監控取證或要求真實性的工作,就要非常審慎。
項目提供嘅技術資訊相對精簡。已知它使用 diffusers,pipeline tag 係 video-to-video,模型檔案列出 black-magic-ic-lora-450.safetensors,而名稱中標示對應 LTX-2.3 22B。不過頁面截圖內容未見上下文長度、GGUF 格式量化、mmproj、llama.cpp、Ollama、LM Studio、MTP draft speculation、v2 更新紀錄、檔名變更或 chat template 說明,代表呢頁並唔係本地 LLM 部署型模型卡,相關部分無法確認。
- 基礎模型已明示為 Lightricks/LTX-2.3,關係為 adapter,而唔係完整重訓主模型。
- 能力核心係 shadow reconstruction,重建暗部觀感,唔等於忠實還原原始訊號。
- 標籤集中在 ltx-video、low-light、generative-video、vfx、lighting,用途相當聚焦。
- 已知檔案只有 black-magic-ic-lora-450.safetensors。
同一般曝光修正最大分別,在於接受「畫面不夠資料時需要生成補完」呢個前提。使用者應該將它視為風格化且偏後期製作取向嘅影像模型;想改善觀感、保住影片連續性,它有明確價值,但要用作真實場景還原,頁面本身已經劃清界線。