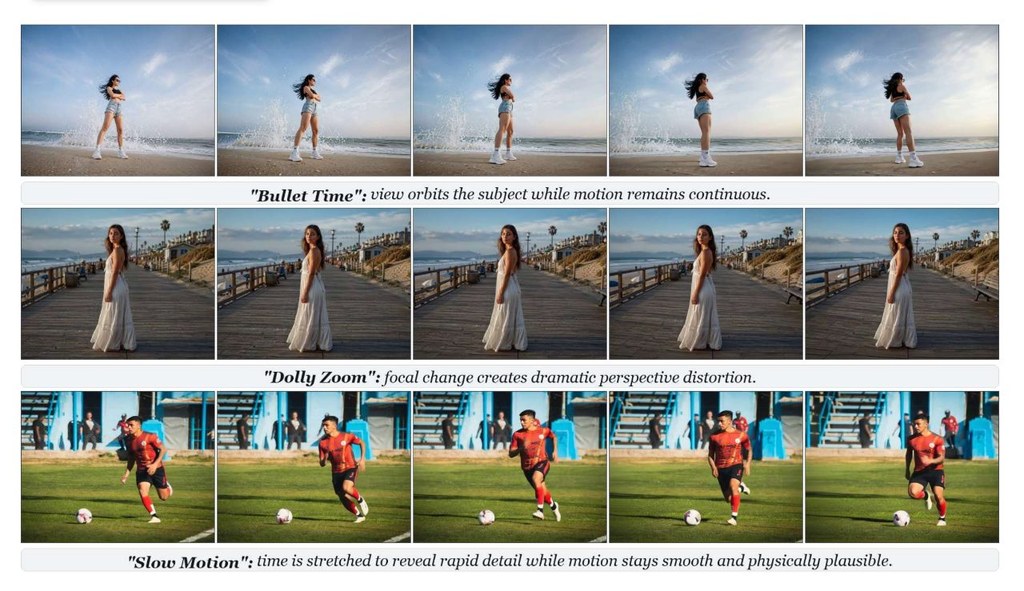
由 Wan 2.1 架構的 teacher model 壓縮而來,CineMobile 針對 image-to-video diffusion 而設,重點唔係追求最大全能,而係讓 bullet time、dolly zoom、slow motion 這類電影感鏡頭可以在手機晶片上跑得動。對一般使用者來說,最大差異是它把原本偏向雲端或高階 GPU 的生成流程,縮短到可在行動裝置完成的級別。
技術路線分三步走:先用 distillation-guided pruning 保留關鍵影片生成能力,再把壓縮後模型結合 diffusion distillation 與 reinforcement learning,進一步做成 4-step generator,最後再用 hybrid post-training quantization 把整體模型壓到 1 GB 以下。這組做法直接對準兩個瓶頸:DiTs 參數太大,以及多步去噪太慢。
頁面提供的數字相當具體。相比採用 Wan 2.1 architecture 的 teacher model,CineMobile 可帶來 40× 生成加速;生成 49-frame、480p 影片時,在 NVIDIA H200 GPU 的每步 denoising latency 為 0.6 秒,在 MediaTek Dimensity 8400 Ultimate 5G 平台約為 20 秒,峰值記憶體使用量為 1.8 GB。這代表它雖然仍有明顯等待時間,但已進入手機可接受的範圍。
- 基礎來源可確認與 Wan 2.1 架構有關,但頁面未見完整 base model 款式或 checkpoint 名稱
- 核心優化包括 pruning、distillation、reinforcement learning 與 post-training quantization
- 目標輸出為 49-frame、480p 的 cinematic camera motion 影片
- 重點能力在於連續運鏡,同時維持 subject identity 與 scene consistency
Hugging Face 暫未提供可直接下載量化檔的模型頁,未提供 GGUF、mmproj、llama.cpp、Ollama、LM Studio、chat template 或 v2 檔名更新資訊,亦無法判斷是否支援 MTP draft speculation。