CM-EVS 係一個為 3D 場景整理全景 RGB、深度同姿態資料嘅流程工具,重點唔係不停輸出更多畫面,而係用較少但更有代表性嘅視角,盡量覆蓋完整場景。對需要建立訓練資料、檢查場景覆蓋度,或者整理室內空間視圖嘅工作,方向相當清晰。
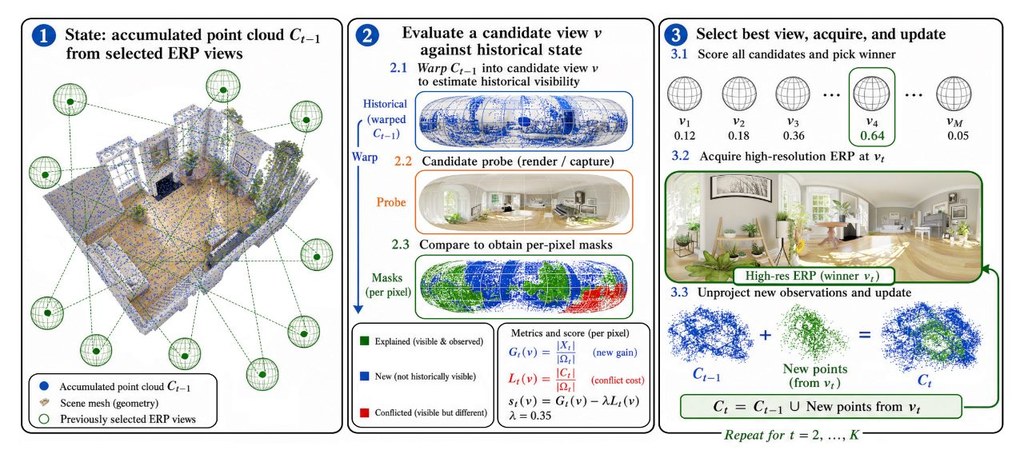
實際使用時,較穩陣嘅做法係先由 Blender 室內場景路線開始,之後再按需要接 HM3D、一般 GLB 或 ScanNet++ PLY 這類來源。流程大致分成三步:先產生候選視角,再從中揀選衝突較低嘅視角組合,最後輸出已選畫面與相關記錄,方便重現結果同做後續核對。
呢個專案特別之處,在於佢唔單止計算「邊個視角睇到最多」,仲會考慮視角之間是否過分重疊,避免揀出一堆內容相似嘅畫面。對建立稀疏但有效嘅資料集尤其重要,因為畫面數量少啲,後續儲存、檢查同訓練成本通常都更易控制。
- 支援統一資料格式,涵蓋 ERP RGB、range-depth 同 pose
- 可處理多種來源,包括 Blender、HM3D/GLB、ScanNet++/PLY
- 會輸出候選視角、逐步紀錄同已選結果,方便重做與比對
- 核心模組拆分得較細,例如投影、深度與變形部分可獨立替換
適合對象包括做 3D 視覺、機械人感知、場景重建,或者要整理研究資料集嘅團隊。文中提到嘅相關資料來源與場景類型,主要有 Blender indoor、HM3D、generic GLB、ScanNet++,亦提及可延伸到戶外來源;不過從公開資訊睇,Blender 室內路線仍然係最建議先試嘅入口。