這項研究由中國復旦大學提出,聚焦自動駕駛在部分可觀察環境中的難題:前方或路口被遮擋時,系統看不到潛在車輛或行人,但仍要提早規劃安全路線。現有方法通常走兩個方向,一類根據可到達狀態估算風險,往往過於保守;另一類用學習方法預測隱藏目標軌跡,但在高遮擋不確定性下未必夠準。
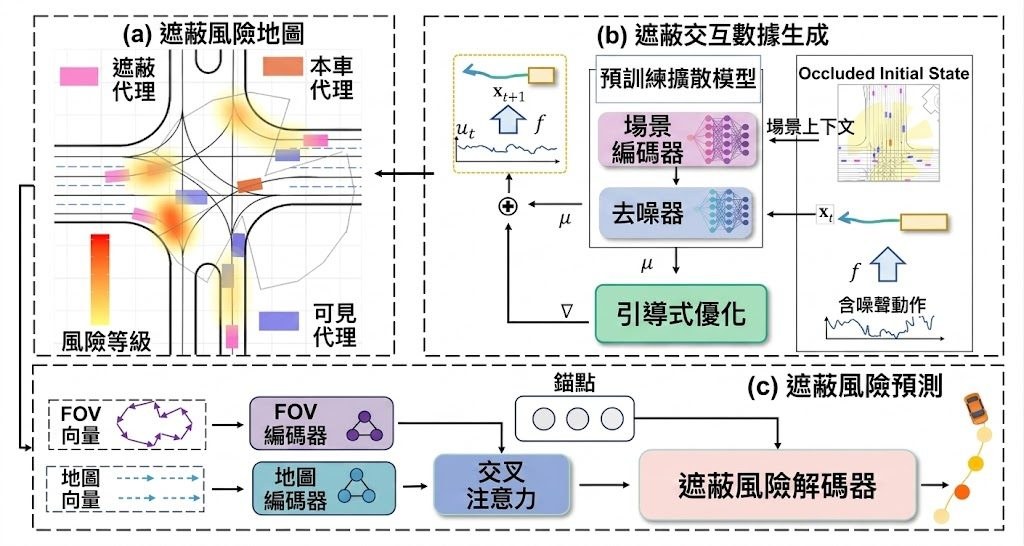
項目首先提出一個 URM (Unified Risk Map),把交通流風險與碰撞風險放入同一個時空框架建模。前者從 multimodal trajectory distributions 估算密度,後者則透過模擬 ego vehicle 軌跡,找出不同時間與位置的高風險區域,令系統不只知道「可能有東西」,亦知道「哪裏更危險」。
為了補足遮擋互動場景不足的問題,研究同時加入 diffusion-based scenario generation framework,生成既真實又帶挑戰性的情境,用來訓練 unified risk map。整體框架把風險建模、學習與規劃串連起來,目標是在 partial observability 下支援 risk-aware planning。
重點可概括為:
– 把 traffic flow risk 與 collision risk 合併成單一風險表示
– 針對 occlusion-aware prediction 的盲點,提供更細緻的時空風險判斷
– 用 diffusion-based scenario generation framework 製造稀缺的遮擋互動情境
– 在 Waymo Open Motion Dataset 上,較現有 occlusion-aware baseline 有明顯提升
這個方法在 Waymo Open Motion Dataset 上,把 minimum time-to-collision 改善 0.78 倍,average time-to-collision 改善 1.67 倍,顯示系統能更早避開高風險情況。這個項目較適合關注 autonomous driving、Planning under Uncertainty、Integrated Planning and Learning 的研究者與工程團隊;如果你想了解自動駕駛如何處理視線死角,這套方法提供了相當具體的方向。