Utonia 是一個統一的自監督點雲 Transformer 編碼器,目標是「一個編碼器適用於所有點雲域」,也就是在不同感測器與場景(遙感、戶外 LiDAR、室內 RGB‑D、物件級 CAD 模型、單目視頻轉 3D 點雲等)上共享同一個 backbone,讓預訓練特徵能跨域遷移。
Utonia 在大量異構點雲資料上 jointly 預訓練一個單一的 Point Transformer V3 編碼器,不依賴 domain‑specific 的頭或模組,只用一個 shared representation space。
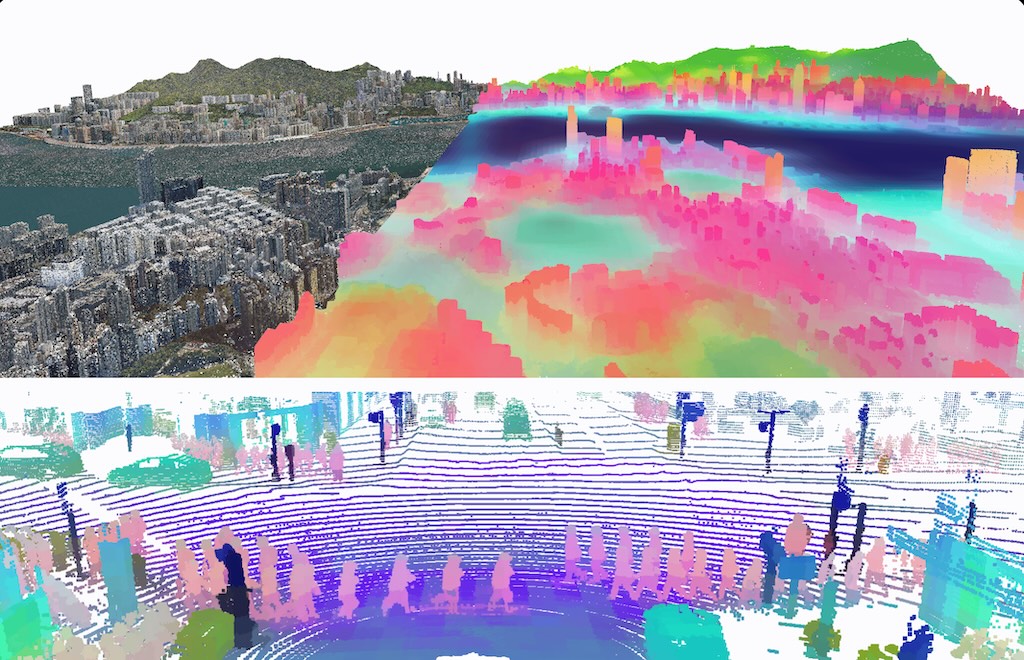
跨域資料混合:
研究中混合了遙感(衛星/航拍)、自駕車用 LiDAR、室內 RGB‑D 掃描、CAD 物件模型、以及從 RGB 影片 lift 上來的點雲,一起放入 masked autoencoding 式的自監督訓練流程。