機械人學習操作技能時,往往要把「預測未來畫面」和「即時輸出動作」綁在同一個節奏上,導致規劃與控制互相拉扯。上海交通大學、百度智能雲及上海人工智能實驗室等團隊提出的 AHA-WAM(Asynchronous Horizon-Adaptive World-Action Modeling)項目,就是要把兩者拆開來處理。
核心架構:雙分支異步運作
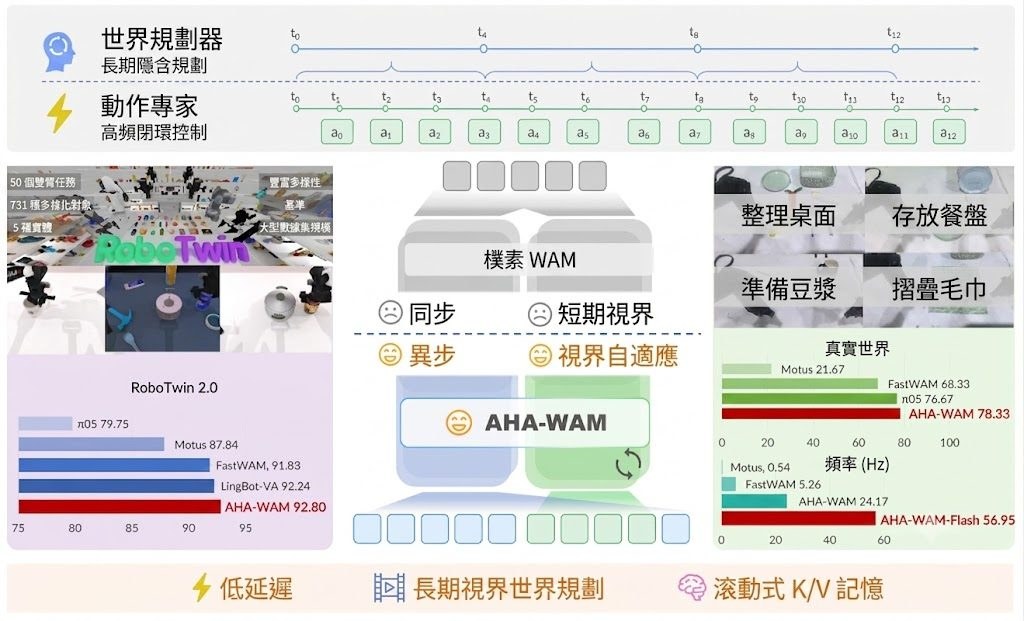
AHA-WAM 採用兩個 Diffusion Transformer(DiT)分支:低頻的 video DiT 負責長程的視覺世界規劃,並利用滾動式 K/V 記憶體儲存可重用的上下文;高頻的 action DiT 則接收本體感覺訊號,向 video DiT 查詢所需上下文後,即時產生短時閉環動作區塊。兩者各司其職,避免互相拖累。
兩項關鍵訓練與推論機制
- Horizon-Adaptive Offset Training(水平自適應偏移訓練):讓執行器在規劃器與執行器出現相位差時仍能穩定運作。
- Observation-Guided Video-Context Routing(觀察引導的視覺上下文路由):根據最新觀察調整快取的規劃上下文,無需重新運行 video DiT 即可對齊當下狀態。
實測表現亮眼
在 RoboTwin 2.0 模擬環境的 50 項雙臂任務中,AHA-WAM 達到 92.80% 平均成功率,且無需任何機械人數據預訓練;在四項原始設定的真實雙手任務中則取得 78.33% 成功率。控制頻率方面,閉環頻率達 24.17Hz;經 ODE 蒸餾的輕量版 AHA-WAM-Flash 更可達 56.95Hz,相比 Fast-WAM 提升約 10.82 倍。
AHA-WAM 適合研究世界模型、機械人操控策略,以及追求高頻閉環控制的開發團隊;其異步架構亦為離線規劃與即時控制分離的設計思路提供新參考。