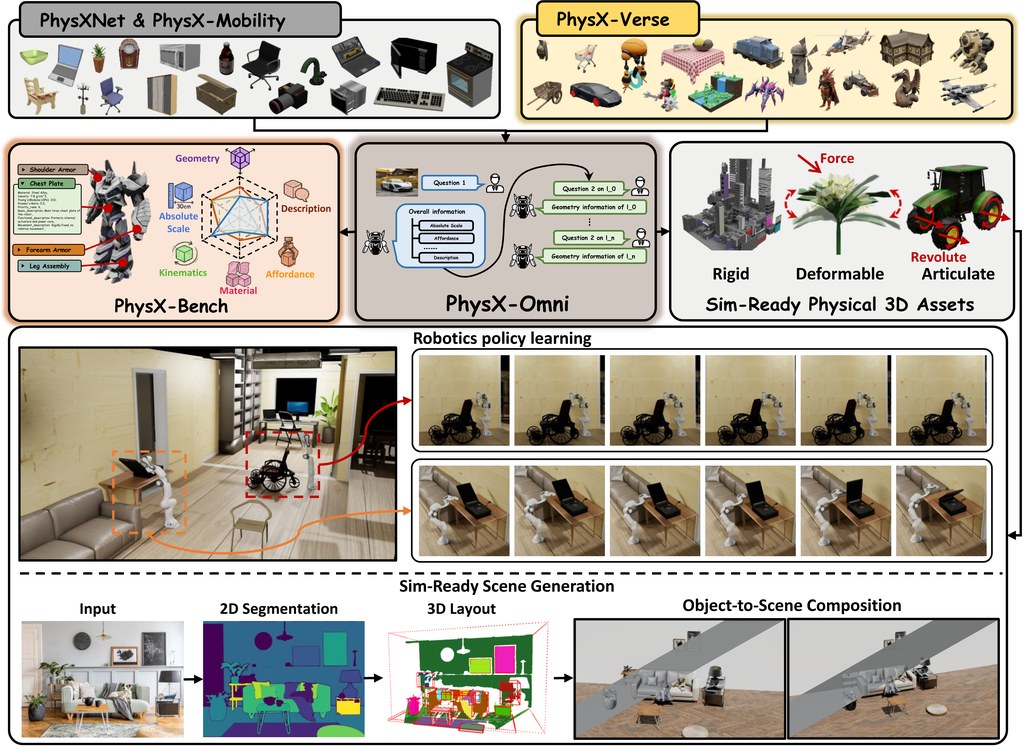
PhysX-Omni 由南洋理工大學及 中國 ACE Robotics 開發,是個面向模擬用途的 3D 生成項目,重點不只是做出外觀,而是連同剛體、可變形物件與可動關節物件一併考慮。簡單說,它想解決的問題是:很多 3D 生成結果看起來像樣,但未必能直接放進物理模擬或機械人流程裡使用。
這個項目的亮點,在於把幾何形狀、絕對尺寸、材質、可供互動的功能,以及運動結構放到同一套框架內處理。它配合 PhysXVerse 資料集和 PhysX-Bench 評估方法,目標是同時檢查生成能力與理解能力,這點比只看外觀相似度更進一步。
整體流程偏向研究型:先準備 Python/conda 環境,再安裝相依套件,之後下載 PhysXNet、PhysX-Mobility 與 PhysXVerse 等資料,完成前處理和條件圖像渲染,最後再設定訓練路徑。這代表它較適合已有 AI 或 3D 處理基礎的人,而不是即開即用的輕量工具。
PhysX-Omni: Unified Sim-Ready Physical 3D Generation for Rigid, Deformable, and Articulated Objects

- 核心價值:生成可放進模擬流程的 3D 資產,而非只有表面外觀
- 覆蓋範圍:支援剛體、可變形物件、關節物件三類內容
- 相關資源:包括 PhysXVerse 資料集、PhysX-Bench 評估,以及 README 提到的 Qwen2.5 相依套件
- 適合場景:機械人訓練、物理模擬、具條件控制的 3D 場景生成
性能方面,公開資料指出它會用一般指標加上自家的基準一同評估,並強調在生成與理解兩邊都有不錯表現。不過從現有資訊來看,較完整的數字仍應以論文與官方頁面為準;對一般讀者而言,最值得留意的是它把「看得像」推進到「更可能用得著」,這正是這個項目最有意思的地方。