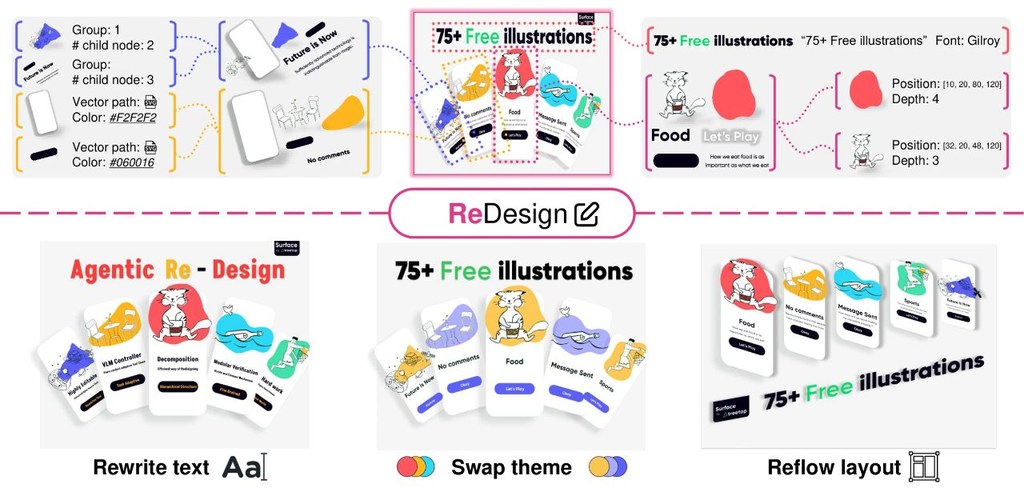
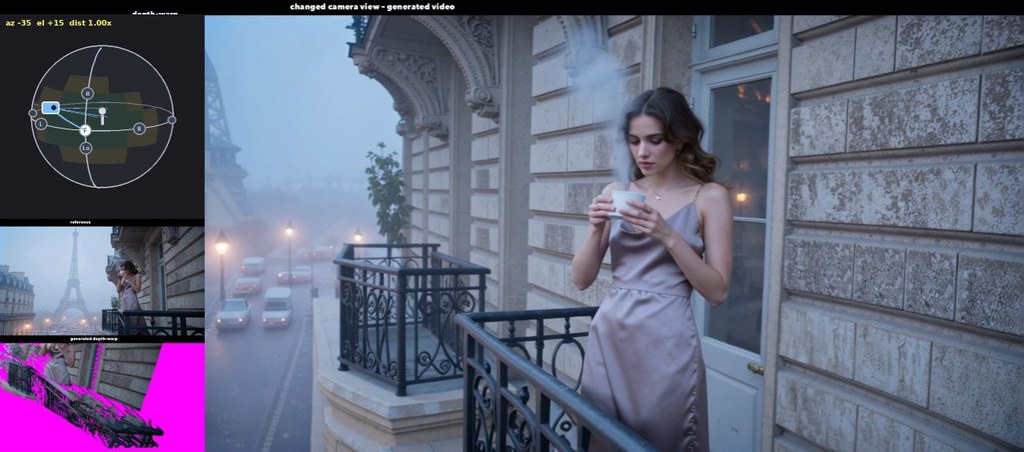
由文字指令直接帶動整條 AI 內容製作流程,正是這段教學最吸引人的地方。影片示範 Hermes Agent 在 Windows 電腦上接手 ComfyUI 操作,把影像、語音與影片生成串成一套可執行工作流,減少人手逐步點擊介面的時間。
這類做法處理的,是多工具協作時常見的斷層:模型會生成內容,但流程仍要靠人逐格設定、切換節點、整理輸出。Hermes Agent 扮演的角色更接近可執行指令的 Agent,讓使用者用自然語言描述需求,再由它推動 ComfyUI 與相關模型完成步驟。
影片標題提到的 Krea 2、LTX 2.3、Qwen 與 Fish Audio,反映這條工作流並不只限於單一模型,而是把視覺、影片與音訊能力接在一起。重點不在單一模型參數,而在於怎樣把不同項目整合成可重複使用的自動化流程。
- Hermes Agent 可在 Windows 環境控制 ComfyUI
- 工作流涵蓋影像、音訊與影片生成
- 輸入形式以簡單文字指令為主
- 涉及 Krea 2、LTX 2.3、Qwen、Fish Audio 等模型或服務
對內容創作者、想整理 AI 製作流程的人,這類教學特別有參考價值。它未必代表所有步驟都能完全免調整,但已清楚展示 Agentic 工作流如何把 ComfyUI 由節點工具,進一步變成可自動執行的製作中樞。