很多視覺推理資料集都只交付圖片同答案,模型答啱咗,未必代表推理過程真係站得住腳。Trace把重點放在可驗證 post-training:它屬於一個資料集兼生成環境,針對的問題是怎樣穩定產生 grounded visual-reasoning 任務,並且讓答案、標註與驗證流程互相對得上。
它採用一條很清晰的生成路線:domain → scene grammar → task program。現有做法常見是先有人手整理題目,或者由圖像與文字鬆散配對,再用最終答案做監督;Trace則用 deterministic seed 先建立 semantic scene state,再由 task program 從同一個狀態推導 typed answer、verifier state,最後才渲染圖片與提示。這種 shared-state 設計的分別,在於題目不是「生成完再補標註」,而是從源頭就把圖像、問題、答案同 execution trace 綁定。
對研究團隊來說,這個取向很有吸引力,因為它同時照顧訓練、檢查同重播。每個例子除了 image、prompt、typed answer,還有 image-space annotation、verifier metadata 同 execution trace;對想做 RLVR、後訓練驗證,或者想分析模型到底錯在觀察、計算還是規則理解的人,資料密度比一般 benchmark 高得多。
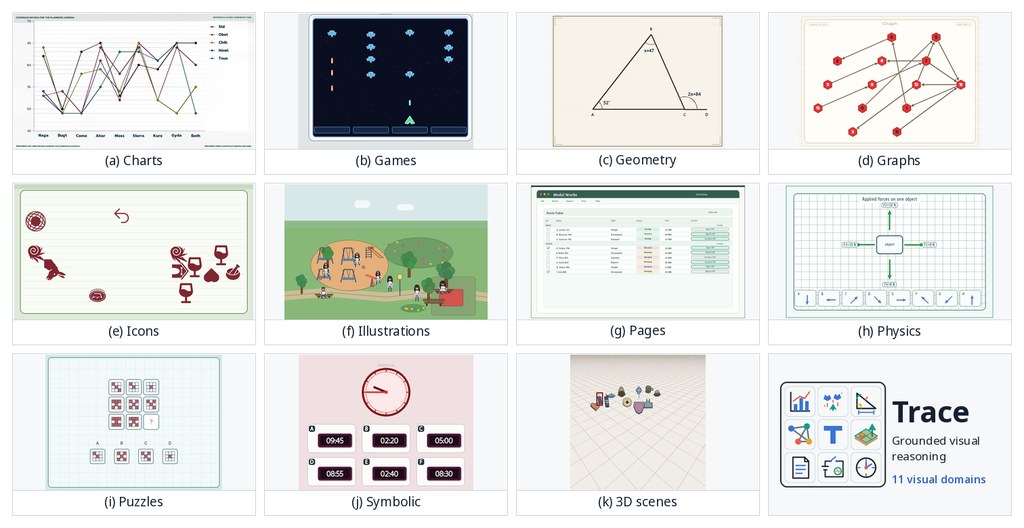
- 收錄 11 個 visual domains、277 個 scene grammars、1,000 個任務
- 已公開 66,000 個 generated examples,亦提供 Hugging Face dataset 與模型檢查點
- 驗證不只看最終答案,還保留 verifier state 與 replayable execution trace
- 以 Qwen2.5-VL-3B、Qwen2.5-VL-7B 做 post-training,兩個尺度都有明顯提升
數字上,它在 2,000 個未見過、但由同一批 task programs 生成的新例子上,將 Qwen2.5-VL-3B 由 24.45 提升到 41.05,Qwen2.5-VL-7B 由 34.25 提升到 51.55。這些結果首先說明 Trace對同分佈泛化有幫助;首頁亦提到用 64,000 個 Trace instances 訓練後,對 24 個外部 benchmarks 的 macro-average 也有改善,但摘要資訊未列完整分項,解讀時仍要看原始報告。
Trace最適合被理解為一個用來建構可核對視覺推理訓練資料的基礎項目,而不只是另一個出題庫。它的取捨也很明確:換來高度可驗證與可重播,代價是任務分佈由 scene grammar 同 task program 明確界定,較適合研究訓練方法、評測設計同模型行為分析,未必等同自然世界的開放式視覺理解。