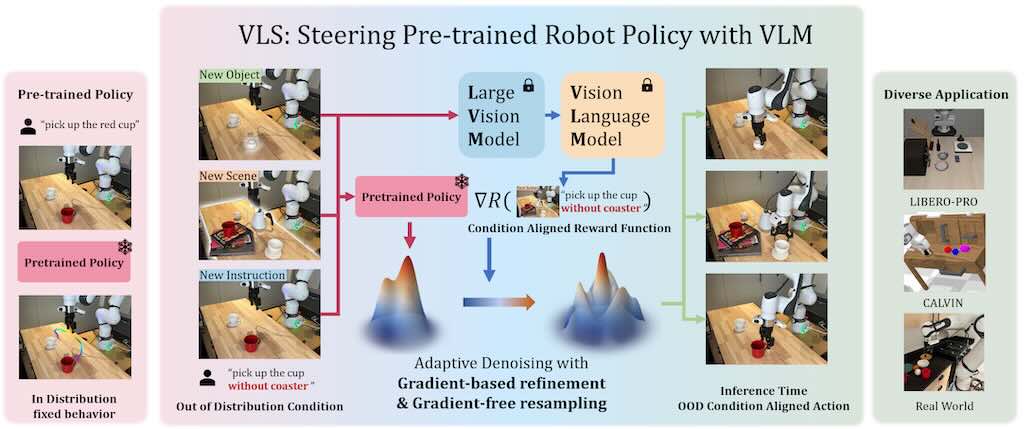
先用現成的視覺‑慣性 SLAM 演算法把鏡頭移動和稀疏點雲拿出來,接著再交給 3D 物件偵測器把每個目標物分割出來。每個偵測到的物件會得到幾張具備相機位姿的多視角圖片、一組稀疏的 SLAM 點,還有一段由視覺語言模型自動產生的文字說明。這些資訊(點雲、多視圖、文字)會被封裝成一個多模态的條件向量,送給訓練好的 rectified‑flow Transformer 去去噪。
Transfomer 輸出的 latent VecSet 接著經過一個 3D VAE 解碼,最後生成完整的三維網格。整個模型只需要在合成資料上先做大量的單物件預訓練,接著再在更具挑戰性的合成場景與真實場景資料上進行兩階段的訓練,過程中會不斷加入各種自然的背景、遮擋、噪聲以及 augmentations,讓模型學會在「雜亂」的環境下仍保持穩定。