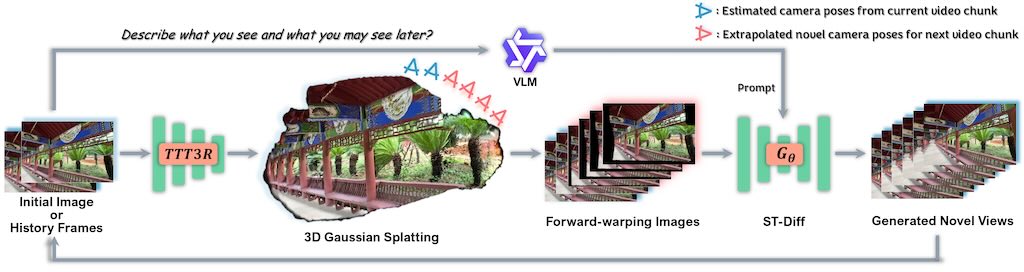
PlenopticDreamer 主要解決「鏡頭控制生成影片」的不一致問題。這是一個能讓 AI「像無人機一樣繞著物體飛」生成影片的技術。它可以應用在自駕車的模擬環境、機器人的視覺訓練,以及好萊塢等級的虛擬拍攝。
1. Robotics(機器人):
* 情境模擬: 機器人需要理解物體在不同角度下的樣貌。這個技術可以根據單一攝影機的畫面,生成該物體在其他視角的影像,幫助機器人進行視覺導航或物體抓取的訓練。
* 模擬數據生成: 為機器視覺系統生成更多樣化的訓練數據。
2. Self-Driving(自駕車):
* 場景理解: 自駕車通常有多個鏡頭。這個技術可以補足盲區,或者將一個鏡頭的畫面轉換成其他鏡頭的視角,幫助車輛更全面地感知周圍環境。
* 未來幀預測: 預測道路上物體在下一秒鐘會出現在哪個位置(從不同角度)。
3. 影視製作與 AR/VR:
* 新視角補全: 如果拍攝時漏掉了某個角度,可以利用這個技術「憑空生成」該角度的連續影片。
* 重定向(Re-direction): 可以將拍好的影片,根據新的鏡頭軌跡重新渲染(Re-rendering),讓同一段故事可以從不同角度重新看一遍。