要同一部電腦處理 TTS、voice cloning、ASR 同音訊增強,最大阻力往往唔係模型本身,而係部署鏈太散。audio.cpp-webui 把這件事收斂成一個偏向本地部署的音訊推理框架+WebUI 工具:核心沿用上游 0xShug0/audio.cpp,以 C++ 配合 ggml 執行,這個分支再補上完整任務介面同較友善的 Windows 啟動方式。
它的定位幾清楚:唔係只做單一模型展示,而係想用同一套 runtime 接住多類音訊工作流。你會見到它涵蓋 TTS、voice conversion、ASR、diarization、VAD、source separation,連 denoise、resampling、STFT/ISTFT 都內建,較接近「把多個音訊 AI 能力放入同一個本地工作台」,而唔係逐個 Python 項目分開跑。

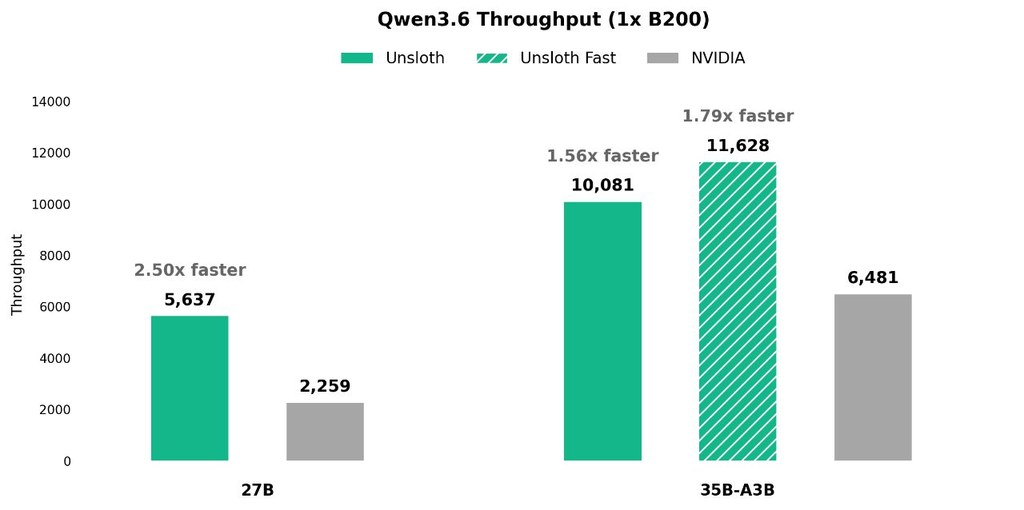
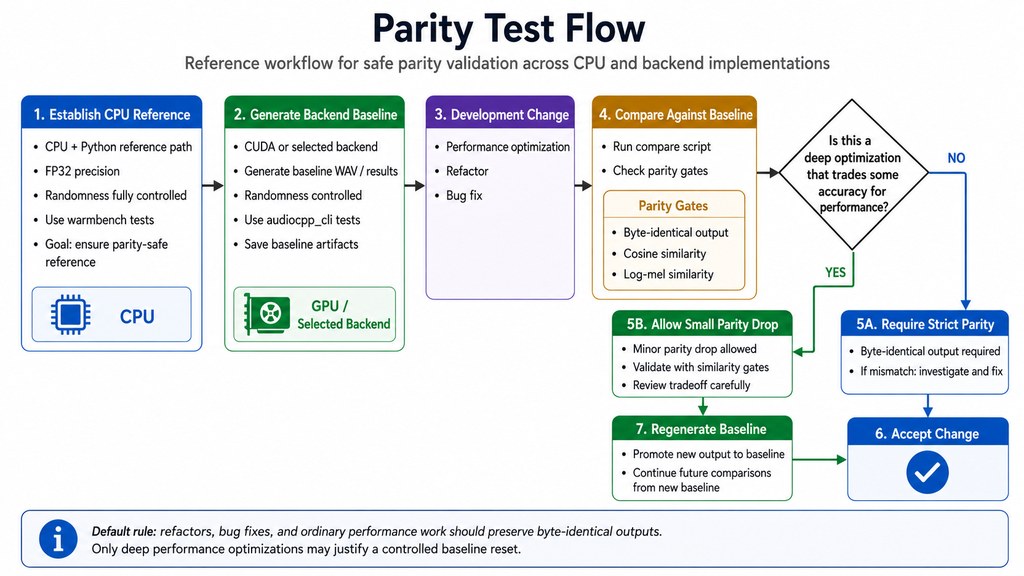
跟常見 Python 參考路徑相比,這個項目的取向是用原生執行環境換取更穩定的部署體驗同速度,代價是功能節奏仍然受上游整合進度影響,而且部分高階流程像 JSON pipeline 仍屬 experimental。效能數字是它最值得留意的一環:多條 TTS 路徑在 CUDA 上可比 Python reference paths 快 1.8x 至 5.0x,端到端延遲可降低 45% 至 80%;README 亦列出 VibeVoice 1.5B 能在 18.2 分鐘生成 93.9 分鐘 podcast。
- 可用
webui.bat啟動 Gradio WebUI,本地網址是http://127.0.0.1:7860 - 支援按需載入模型、模型切換、下載模型、上傳或錄製 reference voice
- 內建進階參數控制,同頁可見執行狀態與錯誤訊息
- 較適合想在 Windows 或本地 CUDA 環境整合多種音訊任務的人員與小團隊
相關模型與路線目前集中在多種本地音訊模型家族,文中點名 VibeVoice 1.5B,整體則圍繞現代 audio models 的統一推理。對內容製作、語音原型、內部工具驗證,甚至要把多步驟流程包成固定操作的人來說,它補上的並非新奇功能,而是把本來零散的模型執行方式整理成較可重用、較易維護的本地項目基礎。